 |
|
This research is supported by NASA's Fluid Physics Program
|
Nonlinear Instabilities
Systems described by nonnormal evolution operators (operators with
non-orthogonal eigenfunctions) often display rather surprising dynamics. For
instance, turbulence in shear flows often develops for Reynolds numbers where
the basic laminar flow is still linearly stable. The critical Reynolds
number at which the transition occurs depends rather sensitively on the
geometry of the system and the roughness of the boundaries. The onset of
turbulence can be linked to a nonlinear (or finite amplitude)
instability arising due to the interaction between the nonlinearity in the
Navier-Stokes equation and strong transient amplification of disturbances
caused by the nonnormality of its linearization about the laminar flow with
strong shear. The idea of a nonlinear instability can also be used to explain
the disagreement between the predictions of linear stability analysis and
experimental data for the contact line instability in driven spreading of thin
liquid films and drift wave instabilities in plasma. Thin films represent a
particularly nice system for studying the effects of transient amplification
due to easy experimental accessibility (click here to see
some movies) and the availability of a simple analytical description in terms
of the lubrication theory.
Another application of the theory of nonlinear instabilities is to control
of spatially extended systems. Nonnormality, it turns out, can also arise in
the absence of mean flow as a result of localized feedback control. For
instance, the dynamics of all scalar reaction-diffusion equations in one
spatial dimension, controlled at one or both boundaries, displays pronounced
transients (see, e.g., figure below), characteristic of strong nonnormality.
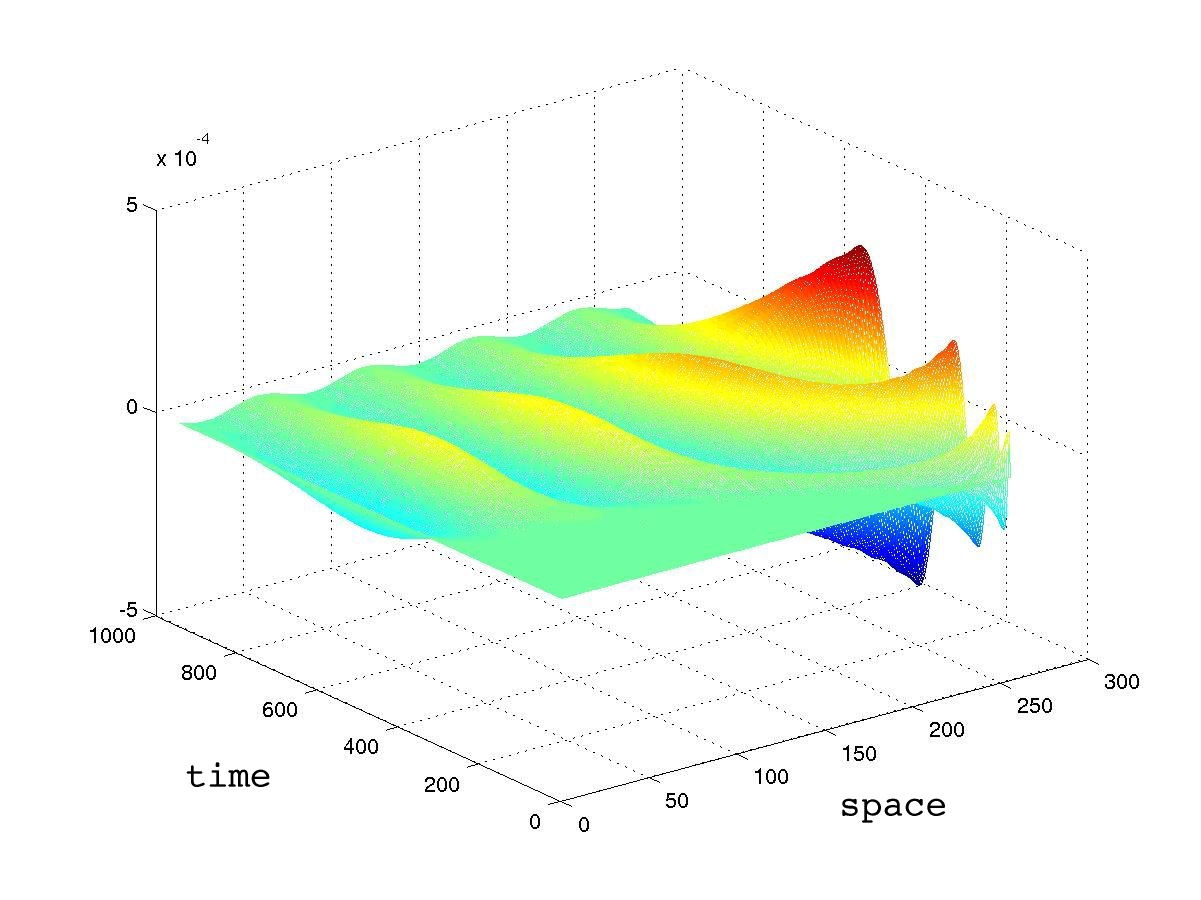
Transient amplification leads to extreme sensitivity of the dynamics to
noise, which increases exponentially fast with the size of the system. As a
result, localized control of a system with large spatial extent can fail for a
very small level of noise. This failure can be explained using the idea of a
nonlinear instability: nonlinear terms distort the action of linear control,
producing a positive feedback loop amplifying stochastic disturbances.
-
R.O. Grigoriev,
Contact line instability and pattern selection in thermally driven liquid
films,
Phys. Fluids 15, pp. 1363-1374 (2003)
-
R.O. Grigoriev and A. Handel,
Spectral theory for the failure of linear control in a nonlinear
stochastic system,
Phys. Rev. E 67, 065301(R) (2002)
-
R.O. Grigoriev and A. Handel,
Nonnormality and the localized control of extended systems,
Phys. Rev. E 67, 067201 (2002)
Go back to Home Page